геопространственных решений
сб-вс: Выходной
ПРИНЦИП ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ
Данные лазерной съемки в области ДЗЗ на значительных пространствах (не спектроскопия и д.р. применения лазера) получают с помощью сенсоров (приборы, датчики), которые в практике называют лидарами (строго говоря, не совсем правильно, но классификатор ДЗЗ принимает это название). Лазерное сканирование — это термин, иногда используемый как синоним LIDAR, но более правильно обозначающий процесс сканирования объектов или земной поверхности с помощью такой технологии, осуществляющей множественные измерения.
Лазерное сканирование - способ измерения расстояния с помощью LIDAR, это прибор, который с помощью лазера определяет расстояния до объектов.
Лазерное сканирование – высокоточное и высокоскоростное измерения расстояния и углов от сканера до объекта, на основе измерений формируются трехмерные модели (рис.1).
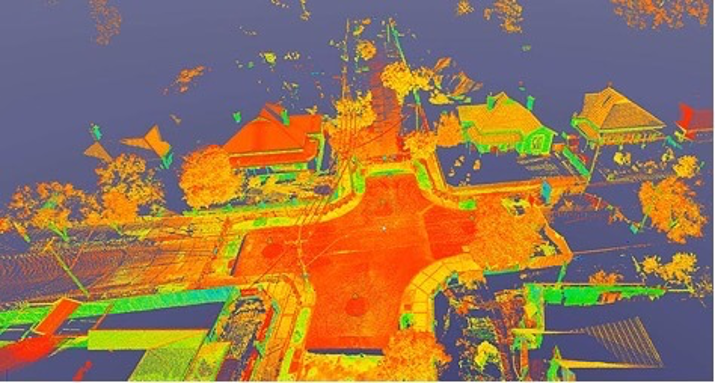
Рис.1
Лидар (Lidar – Light Identification, Detection and Ranging) – это технология получения и обработки информации дистанционного зондирования с помощью активных оптических систем (лазеров), использующих, в том числе, явления отражения света от поверхности Земли с проведением высокоточных измерений X, Y, Z координат. Лидар для ДЗЗ изначально использовался в приложениях воздушной лазерной съемки (ВЛС), является с экономической точки зрения прекрасной альтернативой традиционной съемке с использованием фотограмметрической обработки данных.
Лазерное сканирование, таким образом, является разновидностью активной съемки. Лазерный сенсор (лидар), работающий в импульсном режиме, проводит дискретное сканирование поверхности Земли и объектов, расположенных на ней, регистрируя направление лазерного луча и время прохождения луча. Зная углы разворота и относительные смещения между компонентами описанной системы, можно однозначно определить абсолютные координаты каждой точки лазерного отражения в пространстве (рис.2).
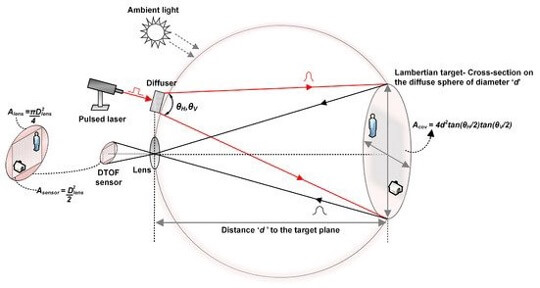
Рис.2
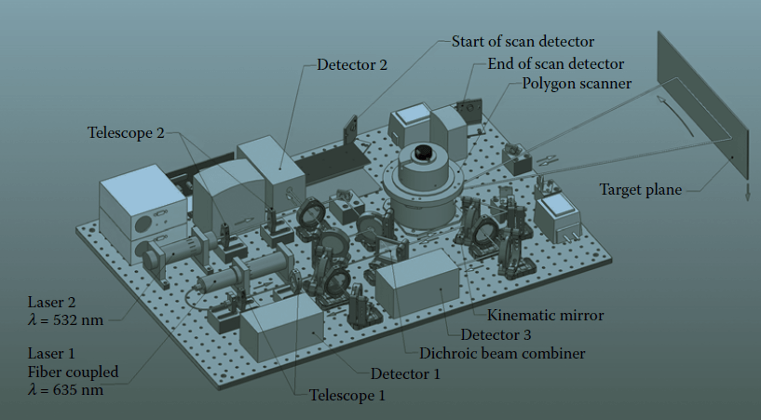
Рис.3 Устройство лазерного (лидарного) сканера
Данные лидарной съемки представляют собой наборов данных, содержащих облака точек, которые могут управляться, отображаться, анализироваться и совместно использоваться с помощью ГИС.
Лазерное сканирование и создания данных, всегда вопрос стоимости, надо ли, ресурсы представления огромны и не всегда позволительны для Заказчика, технология обработки сложная, большая избыточность, что мешает представить продукт, понятный Заказчику. Но это самый точный метод, создания продукта ДЗЗ.
ПЛАТФОРМА ЛАЗЕРНОГО СКАНИРОВАНИЯ
Основной платформой аппаратной установки лидара являются: транспортное средство или устройство (самолет, БПЛА, вертолет, штатив), система лазерного сканирования, GPS (Глобальная система позиционирования) и INS (Внутренняя система позиционирования). INS (Внутренняя система позиционирования) измеряет крен, тангаж и рысканье системы.
Платформа лазерного сканирования ДЗЗ соответствует носителям дистанционного зондирования, пока без спутниковых аппаратов, а именно:
· Наземное лазерное сканирования (лидарные приборы на штативе)
· Мобильное лазерное сканирование (автомобили с лидарными приборами на крыше или на специальных кранах).
· Воздушное лазерное сканирование (ВЛС - авиация и БПЛА).
Во время проведения наземного лазерного сканирования, например, геодезической съемки, геодезист перемещается по земле, устанавливая сканер на штатив и наводит на объекты, производя 3D сканирование. Сканер устанавливается с учетом обзора, т.е выбирается так, чтобы охватит больше деталей и элементов объектов. Исходя из сказанного сканирование можно проводить в любом месте, где можно установить штатив. Эффективность НЛС зависит от количества элементов объекта. Когда на объекте мало элементов, т.е их насыщенность небольшая, то можно предположить о производительности 10 Га-20 Га в день, при работе одним сканеров, а, например, на производственных объектах, где насыщенность большая иногда и 1 Га будет являться идеальным результатом. При наземном лазерном сканировании правильно измерять количеством отсканированных данных, а не площадью.
Второй тип лазерного сканирования — это мобильное лазерное сканирование (МЛС). Этот тип сканирования работает в дециметровом диапазоне, нормальная точность для него находится в пределах 2-5 дециметров. Лазерный сканер располагается на каком-то транспорте, например, на автомобиле (рис.4), т.е сканируется только то, что лежит по пути транспорта.

Рис.4
Например, при сканировании с автомобиля по дороге в городе, в съемку попадает только фасады зданий и часть торца, так же, то что расположено перед фасадом, все остальное остается в тени. Производительность зависит от загруженности дорог, т.е от числа помех, находящихся на дорогах (встречные автомобили, пробки, препятствия на дороге). В удачных день можно наснимать тысячу гектаров, но оценивать результаты правильно погонными километрами дорог.
Воздушное лазерное сканирование (ВЛС) – представляет собой технологию высокочастотного облучения лазерным излучателем земной поверхности, включая надземные объекты с любого воздушного аппарата и получением координат лазерных точек на основе разницы во времени от излучения до принятия отраженного луча. ВЛС служит основой для получения трехмерных моделей рельефа.
ВЛС применяется для высокоточного картографирования линейных и площадных объектов в масштабах 1:500–1:5000 с воздушных носителей (самолет, вертолет, беспилотные летательные аппараты). Точность составляет 5–8 см, детальность отрисовки около 20–50 см, производительность достигает 800 погонных км съемок в день (ширина полосы съемки до 1000–1500 м).
Этот тип сканирования работает уже в метровом диапазоне, т.е для него нормальная точность находится в пределах 0,5-1,2 метра. При хороших погодных условиях, от качества оборудования можно получить точность в районе 10-40 см. Точность мобильной и наземной съемки сильно превосходит ВЛС, но его преимущества не в точности. Дело в том, что с неба видно все, т.е съемка не ограничена, где стоит сканер, теневые зоны находятся будут появляться только вблизи возвышенных объектов, например, от пышной шапки дерева, или крыш зданий. Так же преимущества этой съемки, в том, что за один полет можно снять десятки тысяч гектаров.
Имеются недостатки, связанные с низкой подробностью при съемке вертикальных плоскостей (например, стен).
Уникальные возможности технологии данного сканирования позволяют получить:
– истинный рельеф поверхности, 3D модели местности (рис. 1);
– топографические планы и карты в местности где нет наземных ориентиров (таких как тундра, полностью заснеженные территории, пустыни, песчаные пляжи и др.).
Мобильное лазерное сканирование – современный, быстрый и технологичный способ получения пространственных данных в виде 3D модели местности с очень высокой точностью. Мобильное лазерное сканирование лучше всего подходит для выполнения измерений линейно-протяжённых объектов, и в первую очередь, – автомобильных дорог. Результатом сканирования является очень подробный (плотный) набор (облако) трёхмерных точек поверхности – сотни и тысячи измерений на 1 м².





СЕНСОРЫ- ЛИДАРЫ ДЛЯ ВОЗДУШНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ (БПЛА)
Лидар – это активный оптический сенсор (рис5), испускающий лазерные лучи в сторону цели во время движения платформы ВЛС по специальным съемочным маршрутам.

Рис.5
Отражение лазера от объекта принимается и анализируется сенсором. Приемники записывают точное время, прошедшее с момента испускания лазерного импульса системой до момента его возвращения, для того чтобы вычислить расстояние между сенсором и целью. Совместно с информацией о внутреннем и внешнем позиционировании (GPS и INS), эти расстояния преобразуются в трехмерные точки, отображающие поверхность отражения лазерных импульсов.Точечные данные подвергаются последующей обработке после сбора с учетом диапазона времени работы лазера, угла сканирования, координат GPS, информации о внутреннем позиционировании (INS), что позволяет получить точные координаты x,y,z.
ФИЗИЧЕСКИЕ ПРОЦЕССЫ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ
Существуют разные характеристики в зависимости от предполагаемого применения
лазерных сканеров. Важными отличиями являются:
- диапазон;
- длина волны;
- точность;
- частота импульсов;
- возможность различения одиночных и множественных возвратов вплоть до полной
формы отраженного лазерного сигнала.
Лазер излучает когерентный свет с очень малым углом расхождения, что позволяет сфокусировать свет на большом расстоянии. В зависимости от угла расходимости и расстояния до испускаемого лазерный пучок будет иметь определенную толщину. Длина волны излучаемого лазерного луча обычно находится в ярко-зеленой области спектра (~ 532 нм) или в ближней инфракрасной области (~ 1064 нм) энергетического спектра.
Отражения лазерных импульсов лидара
Лазерные импульсы, испускаемые лидаром, отражаются как от находящихся на поверхности земли, так и от находящихся над землей объектов: от растительного покрова, строений, мостов и т.д. Один лазерный импульс может отражаться и возвращаться к сенсору как один раз, так и несколько. Любой лазерный импульс претерпевает несколько отражений при его движении к земной поверхности, разделяясь на столько частей, от какого количества поверхностей он отразился.
Первый отраженный сигнал является наиболее показательным и будет соответствовать самому высокому объекту ландшафта, такому как, например, верхушка дерева либо крыша здания. Первый отраженный сигнал может также соответствовать и земной поверхности. В этом случае лидаром будет захвачено только одно отражение. Несколько отраженных сигналов используются для получения высот нескольких объектов, находящихся на пути лазерного импульса. Отраженные сигналы из середины "спектра" обычно соответствуют растительности, а последние отраженные сигналы используются для моделей собственно поверхности земли. Последнее отражение, однако, не всегда будет соответствовать земле. К примеру, рассмотрим случай, когда импульс попадает в толстую ветку и не достигает земной поверхности. В этом случае последнее отражение произошло не от земли, а от ветки (рис.6).
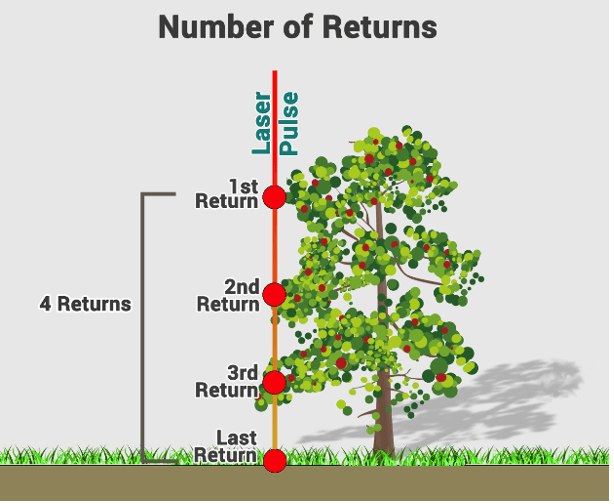
Рис.6
ОСНОВНЫЕ ПРАКТИЧЕСКИЕ ПРОЦЕССЫ ОБРАБОТКИ ЛАЗЕРНОГО СКАНИРОВАНИЯ
Для обработки лазерного сканирования достаточно много ПО, например, программное обеспечение Riegl – комплекс программных продуктов для выполнения полного цикла работ лазерными сканерами Riegl. Отдельно разработаны программы для работы с наземными и мобильными лазерными сканерами, которые позволяют наилучшим образом выстраивать технологический процесс получения полевых данных лазерного сканирования и последующей обработки результатов. ПО ORBIT - комплекс программного обеспечения для обработки данных лазерного сканирования и аэрофотосъёмки. Решения Orbit GT для обработки данных мобильного сканирования, съемки с БПЛА, цифровой аэрофотосъемки для 3D моделирования.
Наиболее известными ПО считаются Bentley MicroStation с MDL -приложениями TerraScan, TerraModeler, TerraMatch, TerraPhoto.
ПО всех традиционных и известных производителей лазерных сканеров.
Прежде всего ПО обработки данных воздушного лазерного сканирования и ДЗЗ, позволяют решать следующие задачи:
· создание топографической основы проектно-изыскательских работ,
· геометрические измерения инженерных сооружений,
· обновление карт местности,
· построение цифровых моделей рельефа (растровая модель, TIN, GRID),
· построение математических моделей с использованием интенсивности отражений лазерного импульса,
· дешифрирование объектов местности,
· создание ортофотопланов на основе классифицированных точек земной поверхности.
Так или иначе, данные лазерного сканирования связаны с представлением в ГИС и содержат общие описания отражения импульсов лидара и облака точек:
Атрибуты точек лидара
Помимо позиционных значений x, y и z системой сохраняется также дополнительная информация. Для каждого лазерного импульса записываются и сохраняются следующие атрибуты: интенсивность, номер отражения, количество отраженных сигналов, значения классификации точки, крайние точки линии полета, значения RGB, время GPS, угол и направление сканирования. В следующей таблице описаны атрибуты, которые можно получить для каждой точки.
|
Атрибут лидара |
Описание |
|
Интенсивность |
Сила отражения лазерного импульса, соответствующего лидарной точке. |
|
Номер отраженного сигнала |
Испускаемый лазерный импульс может создать до пяти отраженных сигналов в зависимости от объектов, от которых он отражается и возможностей лазерного сканера. Первый возвращенный импульс будет помечен как отраженный сигнал номер один, второй – как номер два и т.д. |
|
Количество отраженных сигналов |
Количество отраженных сигналов – это общее число отражений данного импульса. К примеру, точка лазерных данных может быть вторым отраженным сигналом из пяти отражений. |
|
Классификация точек |
Каждая в дальнейшем обработанная точка лидара может содержать значение классификации, которое определяет тип объекта, отразившего лазерный импульс. Лидарные точки могут быть классифицированы на несколько категорий, таких, в том числе, как поверхность Земли, верхняя граница полога леса и водная поверхность. Классам присваиваются целочисленные значения кодов, хранящиеся в файлах LAS. |
|
Граница линии полета |
Точки будут обозначены по значению 0 или 1. Точки, находящиеся на линии полета, получат значение, равное 1, остальные – равное 0. |
|
RGB |
Данным лидара может быть присвоен атрибут RGB. Эта атрибутивная информация часто берется из изображений, которые получаются одновременно с лазерной съемкой. |
|
GPS-время |
Время GPS, соответствующее моменту испускания импульса. Значение времени соответствует числу прошедших секунд в неделе. |
|
Угол сканирования |
Угол сканирования – это значение в градусах из диапазона от -90 до +90. При 0 градусов лазерный импульс испускается перпендикулярно и осуществляется съемка в надир. При значении, равном -90 градусов, лазер испускает импульсы влево, а при +90 – вправо от самолета в направлении полета. Большинство систем лазерного сканирования работают в диапазоне от -30 до +30 градусов. |
|
Направление сканирования |
Направление сканирования – это направление движения зеркала сканирующей системы в момент испускания системой лазерного сигнала. Значение, равное 1, соответствует положительному направлению сканирования, а равное 0 – отрицательному. Положительное направление означает, что сканер двигается слева направо по направлению полета, а отрицательное – наоборот. |
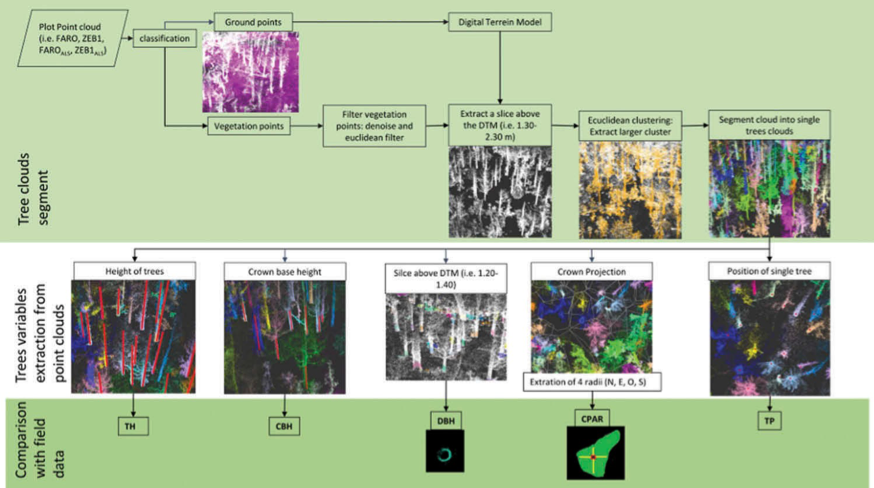
Рис.7 Пример выделения классификации точек атрибутов леса, как тип объекта, в результате лидарной съемки
Хранение лидарных данных
Изначально данные лидара получаются исключительно в формате ASCII. С накоплением больших объемов данных лидарной съемки, бинарный формат, названный LAS, стал использоваться для работы и превратился в стандартный формат организации и распространения лазерных данных. Сейчас совершенно обычным делом являются лидарные данные в формате LAS. LAS является наиболее подходящим форматом, поскольку файлы в этом формате содержат больше информации и, будучи двоичными (бинарными), они могут более эффективно считываться при импорте.
LAS является промышленным стандартом, разработанным и используемым Американским обществом по фотограмметрии и дистанционному зондированию (ASPRS). LAS – это стандартный файловый формат для обмена данными лидарных съемок. Он сохраняет специфическую информацию, относящуюся к лидарным данным. Это способ обмена данными для поставщиков и потребителей и сохранения всей специфической для этих данных информации.
Каждый файл LAS содержит метаданные лидарной съёмки в блоке заголовка, сопровождаемые индивидуальной записью для каждого лазерного импульса. Часть заголовка каждого файла LAS содержит атрибутивную информацию о лидарной геодезической съёмке: экстенты данных, дату полёта, число записанных точек, число точек по отражённому сигналу, любые дополнительные данные и применяемые масштабные коэффициенты. Следующие атрибуты точечных лидарных данных сохраняются в файле LAS для каждого лазерного импульса: координаты x,y,z, время GPS, интенсивность, номер отраженного сигнала, число отраженных сигналов, значения классификации точек, угол сканирования, дополнительные значения RGB, направление сканирования, границы линии полета, пользовательские данные, ID источника точки, волновая информация.
В таблице ниже сравнивается и поддерживает данные лидара в наборах LAS, файлах LAS, наборах данных мозаики и слое сцены облака точек.
Типы данных, поддерживающие данные лидарной съемки
|
Набор данных LAS или файл LAS |
Набор данных мозаики |
Слой сцены облака точек |
|
|
Размещение данных |
Файловая система |
База геоданных |
Пакет слоя сцены |
|
Отношение к исходным файлам LAS |
Точки |
Точки |
Построение кэша |
|
Ограничение размера |
Ограничено местом на диске |
Ограничено допустимым для базы геоданных размером |
Ограничено местом на диске |
|
Ограничения поверхности |
Поддержка |
Не поддерживается напрямую (поддерживается, если находится в наборе данных LAS или наборе данных terrain) |
Не поддерживается |
|
Входные данные лидара |
Файлы LAS, файлы ZLAS |
Файлы LAS, наборы данных LAS и наборы данных terrain |
Набор данных LAS |
|
Типы лидара |
Наземная и аэросъемка |
Аэросъемка |
Наземная и аэросъемка |
|
Отображение |
Точки, триангуляционная поверхность, отображаемая в 2D и 3D |
Растр |
Точки, видимые в 3D |
|
Анализ |
Инструменты, работающие с облаками точек или данными TIN. Используйте с инструментами, например, 3D Analyst. Используйте с инструментами набора данных LAS. |
Используйте при работе с инструментами, которые поддерживают растровые данные. Используйте с инструментами Spatial Analyst и другими инструментами, предназначенными для обработки наборов растровых данных. |
Не поддерживается |
|
Отобразить |
Прореженные точки. Можно изменить отображение, выбрав различные типы классов или типы данных. Отображение можно настроить, изменив символы и/или фильтры точек. |
Использует кэш для более быстрого отображения данных. Можно изменить отображение, выбрав различные типы классов или типы данных. Отображение можно изменить при помощи диалогового окна Свойства слоя или окна Анализ изображений. |
Прореженные точки. Использует кэш для более быстрого отображения данных. Отображение можно настроить, изменив символы и/или фильтры точек. |
|
Редактирование точек |
Можно редактировать классификацию точек, находящихся в файлах LAS |
Нельзя редактировать точки |
Нельзя редактировать точки |
|
Объединение с данными |
Поддерживает файлы LAS, классы пространственных объектов и шейп-файлы |
Поддерживает файлы LAS, наборы данных LAS, а также наборы данных представления поверхностей (terrain) и другие растровые форматы |
Поддерживает наборы данных LAS. |
Файлы LAS или ZLAS – данные лазерного сканирования
Можно использовать отдельные файлы LAS или ZLAS в ГИС, который позволяет быстро изучить файл LAS или ZLAS быстро, не создавая набор данных LAS. Эта функциональность позволяет изучить данные до того, как файл будет использоваться в качестве входного элемента в другом наборе данных. Файлы LAS и ZLAS ведут себя так же, как набор данных LAS в ГИС и могут быть представлены Заказчику.
С файлами LAS и ZLAS можно работать следующим образом:
Отображать в виде 2D или 3D точек с использованием их высот, либо с помощью различных способов отображения точек, основанных на ряде лидарных фильтров, примененных к облаку точек:
· Отображать в виде модели триангуляционной поверхности (TIN).
· Отображать с использованием высоты, уклона, экспозиции или горизонталей, на основе определенных лидарных фильтров.
· Использовать в качестве входных параметров для инструментов анализа, например, 3D Analyst.
· Редактировать классификацию точек.
· Использовать лидар как набор данных LAS.
Набор данных LAS позволяет получить быстрый доступ к большим объемам лидарных данных и данных в виде поверхностей без всякой необходимости в преобразовании и импорте данных. Можно работать с несколькими тысячами файлов LAS, охватывающими целый административный район, или с несколькими файлами LAS для определенной изучаемой области. Это позволит быстро проверить файлы LAS или ZLAS, получив полную статистику и покрытие территории лазерной съемкой файлами LAS или ZLAS.
С набором данных LAS можно работать следующим образом:
· Показывать в 2D или 3D как точки при помощи механизмов отображения высот или атрибутов точек на основании определённых фильтров лидара, примененных к облаку точек
· Отображаться в виде модели триангуляционной поверхности
· Отображать с использованием высоты, уклона, экспозиции или горизонталей, на основе определенных лидарных фильтров
· Использовать в качестве входных параметров для инструментов анализа, типа 3D Analyst
· Редактировать классификацию точек
· Редактировать файлы LAS
· Наборы данных LAS можно редактировать с целью внесения обновлений в классификацию исходных файлов LAS или в объекты-ограничители поверхности модели. Редактирование классификации точек в файлах ZLAS в данный момент не поддерживается.
· Использовать лидар в наборе данных мозаики
· При добавлении ваших данных лазерной съемки в набор данных мозаики они будут использованы и отображены в растровом виде. Это позволяет вам делать следующее:
· Использовать такие инструменты, как Видимость, Изолиния и Профиль.
· Оценивать объемы.
· Использовать как ЦМР.
· Использовать их для ортотрансформирования изображений.
· Использовать их в приложениях, поддерживающих растры, но не поддерживающих файлы и наборы данных LAS.
Набор данных мозаики схож с набором данных LAS, поскольку он также содержит только ссылки на набор исходных данных и не перемещает все точки из одного формата в другой, быстро создается, имеет небольшой размер и легко обновляется с помощью дополнительных файлов LAS. Либо вы можете преобразовать файлы или набор данных LAS в набор растровых данных.
Также у вас есть возможность использовать набор данных мозаики для каталогизации всех ваших лидарных данных.
Данные лидара можно представлять и с помощью слоя облаков точек сцены.
Слои сцен облака точек позволяют быстро отображать большие объемы данных облаков точек с настроенными символами и фильтрами. Они оптимизированы для отображения и публикации различных видов сенсорных данных, включая лидар.
Наборы данных Terrain
Набор данных Terrain – это созданная на основе TIN поверхность с переменной разрешающей способностью, построенная на основе измерений, сохраненных в виде пространственных объектов базы геоданных. Они обычно создаются лидарами, сонарами и фотограмметрическими источниками. Наборы данных Terrain относятся к базе геоданных, в наборах данных объектов с объектами, используемыми для их создания.
Наборы данных Terrain содержат участвующие в них классы объектов и правила.
К обычным классам пространственных объектов, которые функционируют как источники данных для Terrain, относятся:
· Мультиточечные классы пространственных объектов Облака точек 3D, созданные из источника данных типа лидар или сонар.
· 3D точечные и линейные классы пространственных объектов, созданные на фотограмметрических рабочих станциях, использующих стереоизображения.
· Границы территории изучения, используемые для определения границ набора данных Terrain.
Правила набора данных Terrain контролируют, как используются объекты для того, чтобы определить поверхность. Например, класс пространственных объектов, содержащий край линий тротуара для дорог, мог участвовать в правиле, что его объекты используются как резкие линии перегиба. Это даст желаемый эффект создания линейной неоднородности в поверхности.
Правила также указывают, как класс пространственных объектов ведёт себя в разных масштабах. Объекты края тротуара могли бы быть необходимыми для представления только в средне- и крупномасштабных поверхностях. Правила могут использоваться, чтобы исключить их из рассмотрения в маленьких масштабах, что улучшит скорость обработки.
Набор данных Terrain в базе геоданных ссылается на исходные классы пространственных объектов. Он фактически хранит поверхность не как растр или TIN. Скорее он организовывает данные для быстрого поиска и производит поверхность TIN "на лету". Такая организация включает создание "пирамид Terrain", которые используются, чтобы быстро отыскать только необходимые данные, для создания поверхности соответствующего уровня детализации (LOD – level of detail) для данной области интереса (AOI – area of interest) из базы данных. Соответствующий уровень пирамид используется применительно к текущему масштабу отображения или может быть изменен пользователем в аналитических функциях так, чтобы выбранный уровень разрешения использовался для удовлетворения требований точности (Рис.8.9).
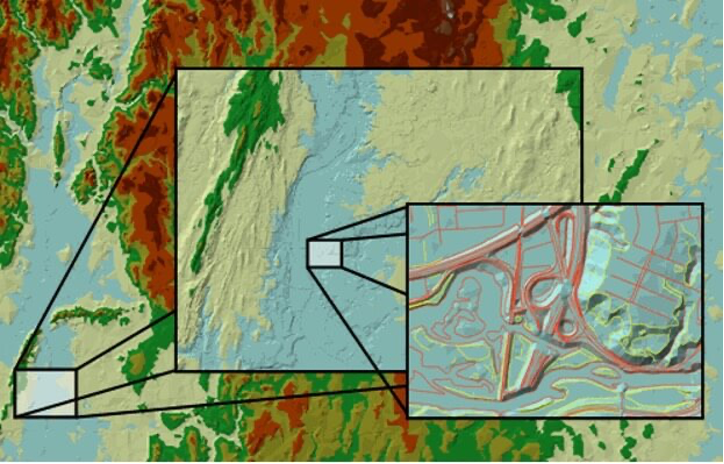
Рис.8
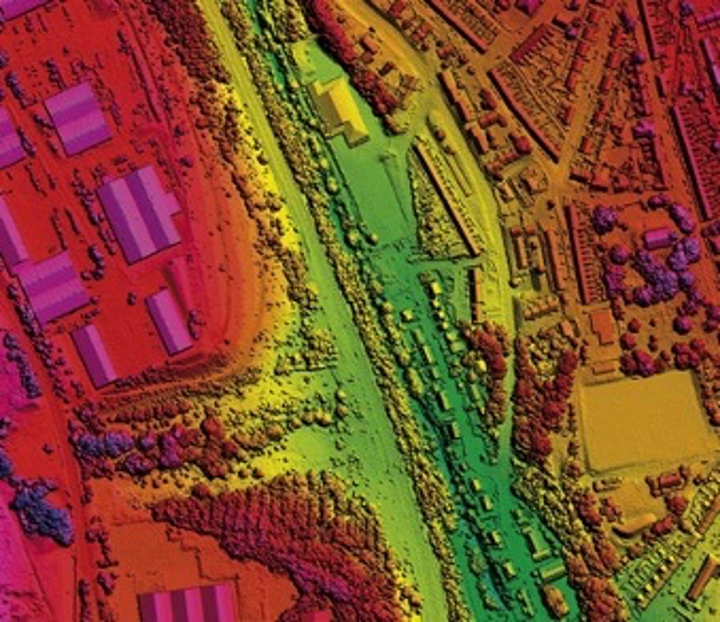
Рис.9
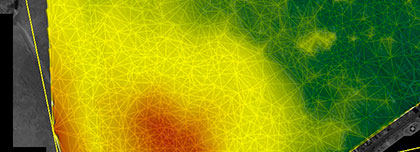
Набор данных Terrain, наряду с его коллекцией поддерживаемых инструментов, разгружает память и обслуживает векторно-ориентированные измерения размеров поверхности в сочетании со способностью использовать поверхности, полученные из этих измерений. Функции обработки геоданных обеспечиваются, чтобы загрузить данные из внешних источников в классы пространственных объектов базы геоданных. Редактирование и инструменты базы геоданных применяются, чтобы поддерживать и обновлять данные в течение длительного времени. Интерактивные инструменты отображения и запросов обеспечивают возможность исследования и использования поверхностей Terrain. Сети TIN – триангуляционная модель (рис.10) и растры (рис.11) могут быть извлечены из Terrain на базе данной области интересов (AOI) и уровней детализации (LOD). Набор инструментов предоставляет исчерпывающие средства формирования и использования поверхности.
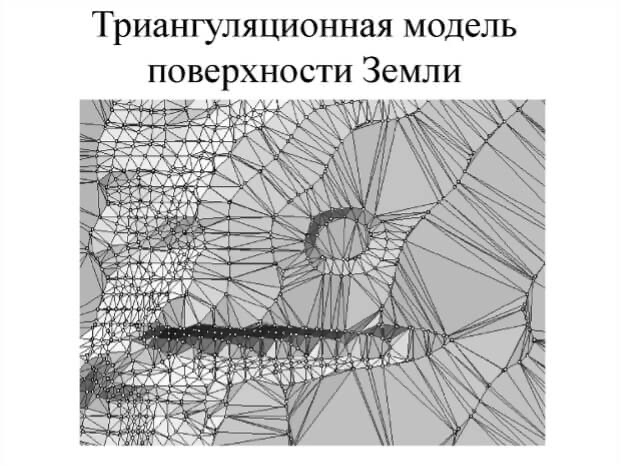
Рис.10
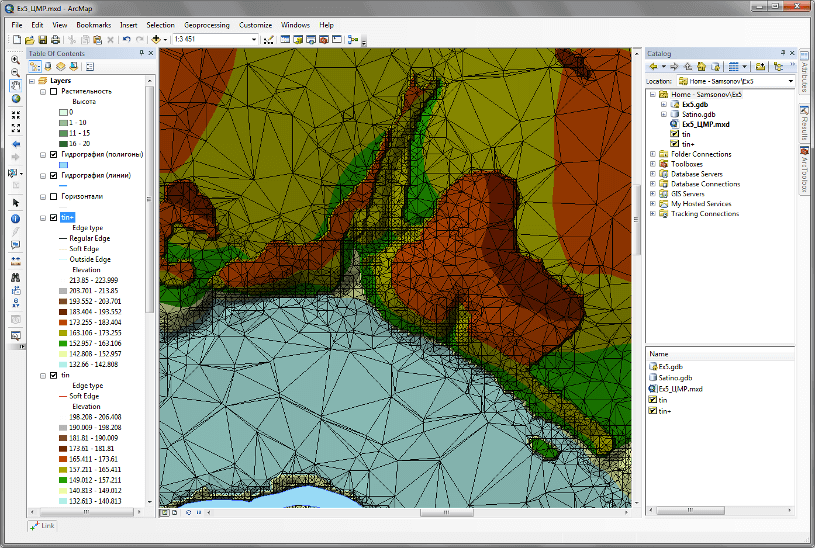
Рис.11
Набор данных Terrain поддерживается как 2D-слой в ГИС. Поэтому его можно использовать для обозначения высот, уклона, экспозиции и прочего, а также его можно драпировать на поверхности в 3D. Набор данных Terrain сам по себе не может применяться как источник поверхности в 3D-видах в ГИС. Рекомендуется выполнить что-то похожее на конвертацию набора данных Terrain в растровую ЦМР и использовать полученный растр как источник высот.
Современные технологии лазерного сканирования предполагают получение «облака точек» с очень маленькой погрешностью, не превышающей в закрытом помещении 1 см, а на открытой местности – 2–3 см. Также есть возможность получения результатов и с более высокой точностью (до 1–5 мм). Погрешности данном случае составляют ±2мм на 10м и 25м.
Отличительные особенности лазерного сканирования:
– полная реализация принципа дистанционного зондирования, что дает возможность изучать объект находясь на расстоянии от него;
– высокая плотность и точность точек на поверхности объекта (рис.12);
– высокая скорость съемки.
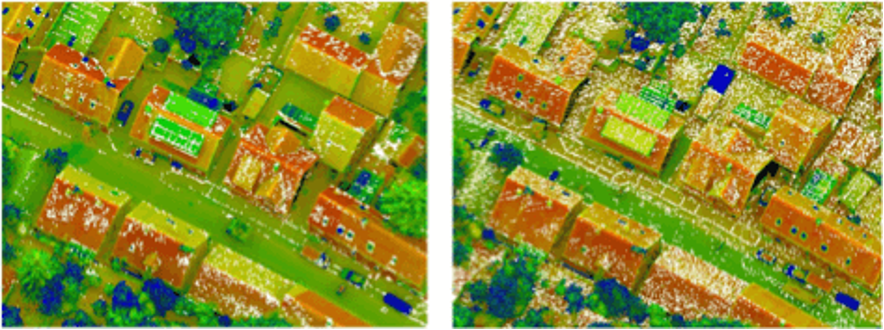
Рис.12
ПРОДУКТЫ ЛАЗЕРНОЙ СЪЕМКИ ПО ОТРАСЛЯМ ЗАКАЗЧИКА
В процессе мировых исследований, выявлено около 600 направлений применения данных лазерного сканирования и создания продуктов на основе этих данных. На сегодняшний день существует множество областей применения лазерного сканирования в отраслях хозяйствования человека:
|
Область применения |
Назначение |
|
Городское планирование |
Определение точной площади застройки, расчет объема существующей застройки, м3/га, инвентаризация существующей застройки, определение высоты зданий, определение линий прямой видимости, определение зон для уплотнительной застройки, городское зонировапне, определение участков под застройку, расчет плотности населения |
|
Промышленное и инфраструктурное строительство |
Определение участков под застройку, проектирование промышленных площадок, дорожное строительство, проектирование и строительство линейных инфраструктурных объектов, расчет объемов землеустроительных работ (объемы извлекаемого грунта и т д.) |
|
Гидравлическое и гидрологическое моделирование |
Определение точного русла рек и ручьев, идентификация границ водораздела, уточнение границ затапливаемых территории, цифровое моделирование направления течения воды, определение непроницаемых поверхностей, моделирование дождевых паводков и проектирование дренажных систем, анализ рисков, мониторинг дамб и искусственных водных объектов, проектирование систем водоснабжения, водоотведения, канализации |
|
Лесное, рыбное хозяйство, природоохранная деятельность |
Таксация лесов, измерение высоты деревьев, расчет объема древесины, расчет биомассы, определение истинного рельефа, анализ городского озеленения, парков, лесопарков, определение секвестрации углерода наблюдение и анализ ареалов обитания |
|
Чрезвычайные ситуации |
Расчет объема горючей массы лесов при лесных пожарах, анализ рельефа для моделирования распространения огня, анализ дымных и химических шлейфов, анализ рисков, цифровое моделирование лесных и стенных пожаров, наводнений, возможных последствий пупами и ураганов, удешевление процесса создания ортофотопланов, построение цифровых моделей ландшафта и рельефа, ЗD-моделирование в целях экономического развития |
|
Геология |
Определение морфологических характеристик, анализ рисков оползней, определение ущерба от оползней, поиск трещин, провалов, разломов, картографирование и мониторинг вулканической деятельности, поиск и добыча полезных ископаемых, мониторинг добычи полезных ископаемых |
|
Управление прибрежными территориями |
Определение и мониторинг прибрежных затапливаемых территорий, мониторинг оседания грунта, размыва берегов, мониторинг повышения уровня океана, определение стабильности прибрежной зоны, управление пляжными территориями, анализ рисков, картографирование затоплений при ураганах и цунами, батиметрические исследования прибрежной зоны |
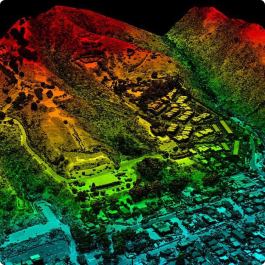
Примеры изображений лазерного сканирования городской застройки (рис.13), лесных массивов (рис.14), нефтеперегонного предприятия (рис.15).
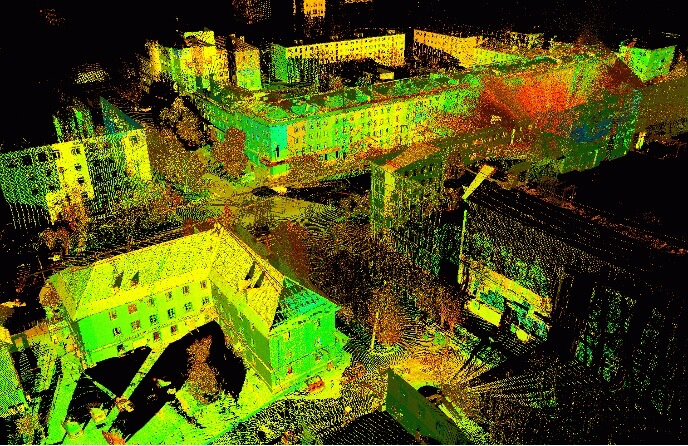
Рис.13
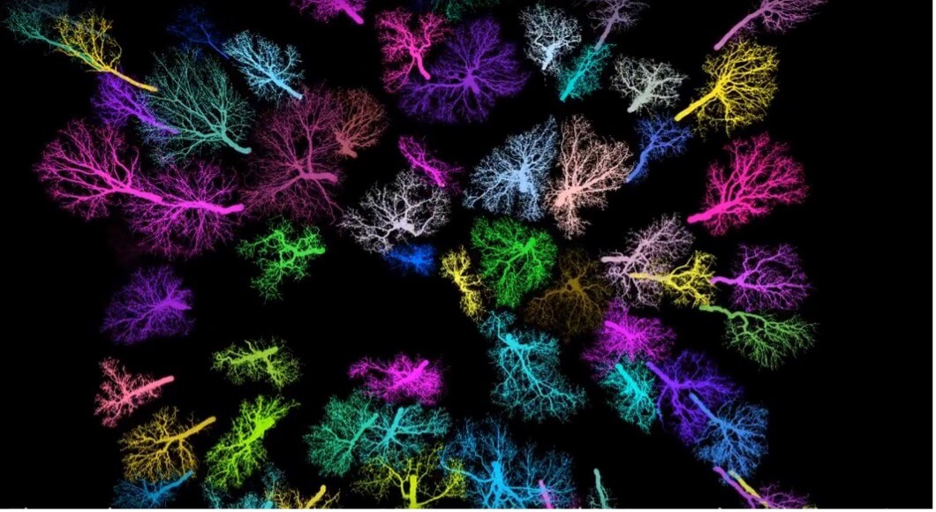
Рис.14
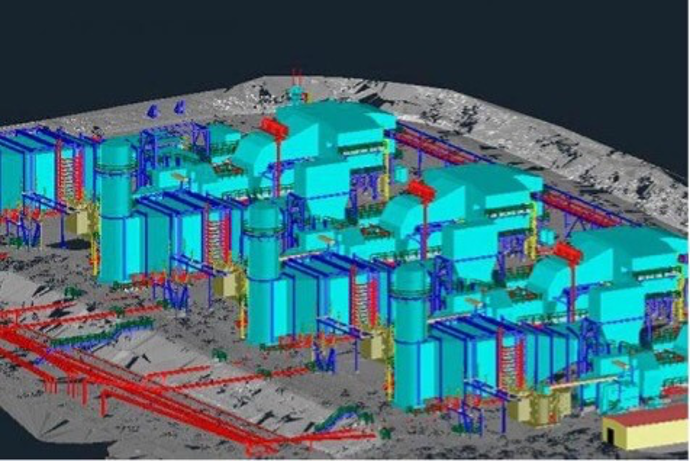
Рис.15
И это далеко неполный перечень направлений лазерного сканирования и продуктов на ее основе.
ЗАКЛЮЧЕНИЕ
Преимущества ВЛС по сравнению с наземными видами съемки:
· создание 3D модели объектов и территории в онлайн режиме;
· высокая точность для площадных работ и протяженных территорий, до 1 см в плане и по высоте;
· сбор данных в ГИС;
· съемка в пустынных, труднодоступных и опасных объектов.
Стоимость по сбору данных и моделированию объектов методами трехмерного лазерного сканирования ВЛС в большинстве работ на уровне традиционных методов. съемки, а на участках большой площади или протяжности — ниже. Преимущество ВЛС над фотограмметрическими способами съемки.
Обеспечивается более высокая точность измерений в сравнении с фотограмметрическими методами.
Недостатки ВЛС:
· нет привязки к единой системе координат;
· детальная съемка сложных объектов не позволяет получить разрешение на уровне мм;
· дополнительные работы по установки координат контрольных точек;
· степень ПО (автоматической обработки) на достаточно низком уровне.
сб-вс: Выходной