геопространственных решений
сб-вс: Выходной
Исходные данные
В рамках Международного эксперимента «HRS Study Theam» компании «Иннотер» была предоставлена стереоскопическая пара изображений HRS (SPOT-5) на тестовый участок № 9 (Бавария), файл метаданных к ней, фрагменты тестовых DEM и координаты 81 точки GPS, а также полевые абрисы их расположения. Геодезические координаты DEM и точек GPS даны в 4 зоне проекции Гаусса-Крюгера, на эллипсоиде Bessel с датумом Potsdam. Дата получения изображений – 01.10.2002 г. В таблице 1 приведены координаты углов левого и правого изображения.
Служебная информация на CD-ROM (для каждого снимка):
- METADATA.
- ICON.JPG
- STYLE.XSL
- DIM PREVIEW.JPG
- IMAGERY.TIF
Углы ориентирования:
- Orientation angle: 15° 08' 41."7948
- Incidence angle: 23° 01' 43."2696
Таблица 1.
|
Левый |
Координаты на снимке (pxl) |
|||
|
1. |
B = 48° 20' 31" N |
L = 11° 59' 17" E |
1 |
1 |
|
2. |
B = 48° 03' 24" N |
L = 13° 32' 48" E |
12 000 |
1 |
|
3. |
B = 47° 32' 16" N |
L = 13° 19' 19" E |
12 000 |
12 000 |
|
4. |
B = 47° 49' 16" N |
L = 11° 46' 42" E |
1 |
12 000 |
|
Правый |
Координаты на снимке (pxl) |
|||
|
1. |
B = 48° 21' 00" N |
L = 11° 58' 47" E |
1 |
1 |
|
2. |
B = 48° 03' 09" N |
L = 13° 32' 00" E |
12 000 |
1 |
|
3. |
B = 47° 31' 58" N |
L = 13° 18' 30" E |
12 000 |
12 000 |
|
4. |
B = 47° 49' 42" N |
L = 11° 46' 11" E |
1 |
12 000 |
Исходные стереоизображения получены методом сканирования along-track вдоль направления полета. При съемке местности их геометрия формировалась путем последовательного наращивания создаваемого кадра отдельными строками, проектирование которых на фокальную плоскость осуществлялось с одним и тем же углом наклона оптической оси объектива: для левого снимка порядка ? ~ 23° вдоль базиса стереопары, для правого – порядка ? ~ 22.5° в противоположном направлении. Угол сноса равен ~ 15°. Ratio-отношение B/H для данной стереопары равно ~ 0.72. Каждая строка исходных изображений является центральной проекцией узкой полоски местности. Ширина ее определяется апертурой сканирования d = 10 м (на местности).
Таким образом, с точки зрения проективной геометрии, сканерные снимки SPOT-5 представляют собой комбинацию наклонной параллельной и центральной проекций.
Хотя стереоскопические снимки SPOT-5 имеют геометрические свойства несколько отличающиеся от геометрии снимков с центральной проекцией, компания «Иннотер» считает целесообразным исследовать возможность создания DEM с помощью фотограмметрической системы «Z-Space».
Результаты предварительной обработки
Анализ полученных исходных материалов позволил установить следующее. Изображения HRS (SPOT-5) сжаты вдоль оси «Х» и развернуто на 90° по часовой стрелке.
Динамический диапазон плотностей изображений достаточно широк и позволяет не прибегать к процедуре изменения его гистограммы в процессе обработки.
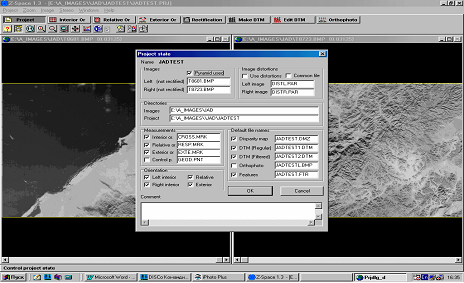
Для фотограмметрической обработки стереоизображений HRS (SPOT-5) в системе «Z – Space» версии 2.0 необходимо определить калибровочные параметры сканера. Эти параметры используются для корректной обработки изображений с применением математической модели сканера HRS.
В связи с тем, что в качестве рабочей системы геодезических координат в системе «Z – Space» применяется система координат WGS-84/UTM, то на начальном этапе было произведено преобразование координат точек GPS из исходной (проекция Гаусса-Крюгера, на эллипсоиде Bessel с датумом Potsdam) в рабочую систему координат.
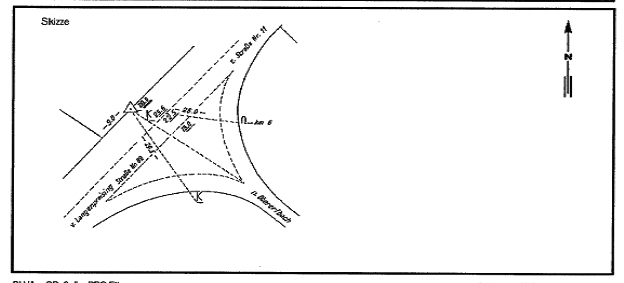
Для нахождения исходных GPS-точек на изображениях SPOT-5 в распоряжение исследователей были предоставлены их полевые абрисы в графическом виде.
Однако непосредственный поиск GPS-точек на снимках с их помощью представляет на практике сложную задачу, так как данные абрисы являются слишком упрощенными представлениями объектов местности. Поэтому было принято решение построить сначала приближенную модель местности на основе использования российских топографических карт и использовать ее для поиска GPS-точек по их геодезическим координатам. В результате на представленной стереопаре были опознаны и измерены 14 связующих точек, которые были использованы для взаимного ориентирования стереопары.
Таблица 2.
|
№№ Point |
Left Image |
Right Image |
||
|
X, pxl |
Y, pxl |
X, pxl |
Y, pxl |
|
|
1 |
48 |
77 |
101 |
164 |
|
2 |
545 |
11853 |
310 |
11937 |
|
3 |
11017 |
10547 |
10781 |
10632 |
|
4 |
11090 |
2330 |
11039 |
2416 |
|
5 |
5697 |
5569 |
5548 |
5656 |
|
6 |
219 |
7337 |
58 |
7422 |
|
7 |
11403 |
5906 |
11181 |
5992 |
|
8 |
5424 |
493 |
5430 |
578 |
|
9 |
4797 |
8104 |
4616 |
8189 |
|
10 |
1797 |
3061 |
1743 |
3147 |
|
11 |
1168 |
5666 |
1049 |
5751 |
|
12 |
7879 |
8908 |
7678 |
8993 |
|
13 |
10033 |
2752 |
9969 |
2838 |
|
14 |
7014 |
4511 |
6894 |
4597 |
Внутреннее ориентирование изображений
Перед началом процесса внутреннего ориентирования оба изображения были развернуты против часовой стрелки на 90° . Исходная «файловая» плоская система координат изображений HRS (SPOT-5) является «левой» и имеет следующий вид:
Данная система координат ОХУ имеет начало в верхнем левом углу изображения. Преобразованная система координат O’X’Y’ является «правой». Размерность по осям Х' и У' в мкм.
Преобразование координат из системы ОХУ в систему О'Х'У' производилось по указанным ниже зависимостям.
X' mkm = Xpxl x dmkm/pxl у' mkm = (-уpxl) x d mkm/pxl d = 6.8 mkm
На основе этих данных было сделано взаимное ориентирование сканерных снимков стереопары.
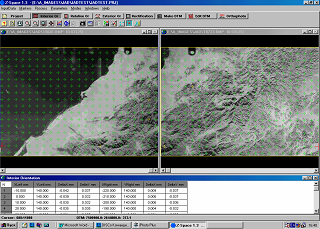
Взаимное ориентирование изображений
Для проведения процесса взаимного ориентирования данной стереопары были использованы14 связующих точек находившихся в зоне перекрытия изображений. Пиксельные координаты этих точек приведены выше в Таблице 2.
Координаты этих точек были преобразованы по указанным выше зависимостям. Преобразованные координаты X’и Y’ для каждого изображения приведены в Таблице 3.
Таблица 3.
|
№№ Point |
Image Left |
Image Right |
||
|
X, mkm |
Y, mkm |
X, mkm |
Y, mkm |
|
|
1 |
312 |
38499.5 |
656.5 |
37934 |
|
2 |
3542.5 |
-38044.5 |
2015 |
-38590.5 |
|
3 |
71610.5 |
-29555.5 |
70076.5 |
-30108 |
|
4 |
72085 |
23855 |
71753.5 |
23296 |
|
5 |
37030.5 |
2801.5 |
36062 |
2236 |
|
6 |
1423.5 |
-8690.5 |
377 |
-9243 |
|
7 |
74119.5 |
611 |
72676.5 |
52 |
|
8 |
35256 |
35795.5 |
35295 |
35243 |
|
9 |
31180.5 |
-13676 |
30004 |
-14228.5 |
|
10 |
11680.5 |
19103.5 |
11329.5 |
18544.5 |
|
11 |
7592 |
2171 |
6818.5 |
1618.5 |
|
12 |
51213.5 |
-18902 |
49907 |
-19454.5 |
|
13 |
65214.5 |
21112 |
64798.5 |
20553 |
|
14 |
45591 |
9678.5 |
44811 |
8119.5 |
На основе этих данных были вычислены элементы взаимного ориентирования стереопары:
?1 = - 5o10’38.42” ; ?1 =0o00’00.00” ; ?1 = - 0o06’10.650”; ?2 = - 5o16’45.52” ; ?2 =0o03’31.49” ; ?2 = - 0o06’06.606”; Iteration number =6.
Остаточные поперечные параллаксы приведены ниже:
Таблица 4.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Создание эпиполярных изображений
Результаты взаимного ориентирования были использованы в процессе создания эпиполярных изображений стереопары с применением известных строгих зависимостей.
Ниже показаны преобразованные значения координат использованных 14 точек в системе координат эпиполярных снимков.
Таблица 5.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Анализ ординат одноименных связующих точек по критерию равенства их друг другу показал, что точность создания эпиполярных изображений соответствует точности взаимного ориентирования исходных изображений.
Внешнее ориентирование изображений
Далее было выполнено внешнее ориентирование стереомодели местности в геодезическом пространстве прекции Гаусса-Крюгера на эллипсоиде Красовского.
Для осуществления процесса внешнего ориентирования эпиполярных изображений HRS (SPOT-5) необходимо найти и достоверно отождествить имеющиеся опорные точки. Как правило, информация о точках GPS предоставляется в виде цифровых абрисов каждой точки и общей схемы их взаимного расположения на рабочих участках, выполненной на аэроснимках либо на спутниковых изображениях высокого разрешения. К сожалению, предоставленные нам данные о положении точек GPS в виде полевых абрисов не позволили произвести их достоверного отождествления не только на изображениях, но и на переданных картографических материалах.
По этому, в качестве дополнительного материала были использованы картографические материалы российского производства.
Совместное применение полевых абрисов и картографических материалов российского производства позволило корректно завершить процесс внешнего ориентирования изображений и обеспечило возможность создания требуемой DEM.
Результаты ориентирования стереомодели
Геодезические координаты начала рабочей системы координат:
B0 = 29° 08' 16.244" L0 = 25° 26' 27.131"
Элементы внешнего ориентирования снимков:
Left: ?1 = - 5° 42' 34.81" ; ?1 = 29° 13' 45.22" ; ?1 = 20° 34' 51.14" RMSxy = +/- 14.0 m Right: ?2 = 7° 26' 19.264" ; ?2 = - 4° 48' 19.26" ; ?2 = 20° 32' 41.86" RMSxy = +/- 12.3 m
Полученное значение RMSxy соответствует внутренней точности использованной карты российского производства.
Результаты ориентирования снимков на эллипсоиде Bessel 1841, GK-projection:
Элементы внешнего ориентирования снимков:
Left: ?1 = 5° 47' 32.614" ; ?1 = 29° 10' 41.68" ; ?1 = 20° 38' 17.26" RMSxy = +/- 11.5 m Right: ?2 = 5° 21' 24.35" ; ?2 = - 4° 51' 48.22" ; ?2 = 20° 36' 18.81" RMSxy = +/- 8.3 m
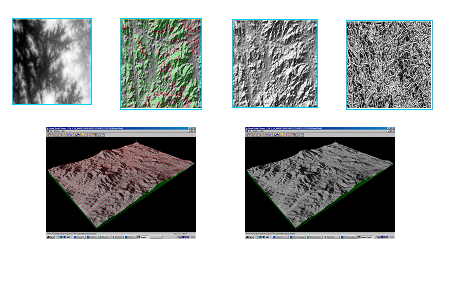
Создание DEM на тестовый участок Vilsbiburg
Создание DEM на тестовый участок Vilsbiburg, с координатами:
UL: R 504000.000 m H 5374000.000 m LR: R 554000.000 m H 5344000.000 m
выполнялось методом профилирования в интерактивном режиме.
Точность данной модели характеризуется следующими параметрами:
RMSxy = +/- 9.5 м в плане ; RMSh = +/- 11.8 м по высоте
Полученная DEM является первым достигнутым уровнем обработки стреоскопических данных HRS системой «Z – Space» версии 2.0.
Заключение
Исследования, проведенные компанией «Иннотер» в рамках международного эксперимента «HRS Study Team» на тестовом участке № 9 (Baviere), показали следующее.
Фотограмметрическая система «Z-Space» версии 2.0, созданная для обработки изображений центральной проекции и адаптированная для обработки сканерных изображений, пригодна для решения задачи создания DEM по стереоизображениям HRS. Изображения HRS обладают высокими геометрическими и изобразительными свойствами.
DEM, созданная компанией «Иннотер» по изображениям HRS с использованием фотограмметрической системы «Z-Space» версии 2.0 на тестовый участок Vilsbiburg (Baviere), имеет точность в плане +/- 9,5 м (RMS) и по высоте +/- 11,8 м (RMS). При обеспечении достоверной индентификации точек GPS точность DEM может быть повышена до +/- 8 м по высоте.
Компания «Иннотер» способна поводить эффективную обработку данных высокого разрешения полученных системой HRS не только на тестовый участок, но и на другие районы интереса потенциальных заказчиков 3D информации.
Коллектив «Иннотер»
сб-вс: Выходной