Unmanned Transport (autonomous transport, self-driving transport, driverless transport, or robotic transport) is a type of transport capable of moving without human intervention.
Unmanned Transport Vehicle - a highly or fully automated vehicle that operates without human intervention (Decree of the Government of the Russian Federation dated March 25, 2020, No. 724-r).
Unmanned transport uses various sensors to perceive the surrounding environment, such as thermographic cameras, radar, LiDAR, sonar, GPS, odometers, and inertial measurement units.
Control systems interpret sensor information to create a three-dimensional model (3D) of the surrounding environment. Based on this model, the vehicle determines appropriate navigation paths and strategies for managing road traffic (stop signs, intersections, main roads, speed, flow, etc.) and obstacles. High definition (HD maps) maps road maps are also an integral part of this technology.
IoT sensors, artificial intelligence, machine learning technologies, and big data analysis are all fundamental to the connected car and autonomous driving phenomenon. It is expected that by 2025, the global IoT automotive market will reach $541.73 billion, with an annual growth rate of 16.4%, and connected car shipments, according to Business Insider forecasts, will reach 65 million by 2030.

At the end of 2022, Resolution of the Government of the Russian Federation dated December 29, 2022, No. 2495, on the launch of a new experimental legal regime (ELR) for the operation of unmanned passenger and freight vehicles in cities and suburbs in 38 regions of Russia, came into effect.
"This experiment will be the largest in Russia and will allow the implementation of unmanned transport technology under various climatic and road conditions from Crimea to the Khabarovsk Krai. It already involves 38 regions from the very beginning, and various unmanned transport vehicles from several initiators are planned to be used," said Mikhail A. Kolesnikov, Deputy Minister of Economic Development.
"The team of Geospatial Agency Innoter provides reliable support to the industry in creating the cartographic base for unmanned transport," said Natalya N. Malkova, CEO of Innoter LLC.
Why is Autonomous Transport Needed?
Unmanned transport is primarily needed to save on the logistics component of cargo delivery on long-distance routes. This savings amounts to hundreds of billions of US dollars worldwide. Secondly, the absence of the human factor eliminates cargo manipulation and reduces criminal and corrupt practices. Thirdly, the growing trend of replacing hydrocarbon fuels with electric ones will lead to simple, safer, and more digital solutions for self-driving transport.
The autonomous vehicle consists of 5 main components:
- Computer vision - identification and classification of objects using cameras.
- Sensor fusion - the use of multiple sensors to improve the vehicle's perception of the world.
- Localization.
- Trajectory planning.
- Control.
Vehicle automation consists of 5 levels:
- Level 0 (no driving automation).
- Level 1 (driver assistance).
- Level 2 (partial driving automation).
- Level 3 (conditional driving automation).
- Level 4 (high driving automation).
- Level 5 (full driving automation).
The autonomous vehicle management system includes the following main components:
- Adaptive Cruise Control (ACC).
- Adaptive Front Lighting (AFL).
- Automatic Emergency Braking (AEB).
- Blind Spot Detection (BSD).
- Cross-Traffic Alert (CTA).
- Driver Monitoring System (DMS).
- Forward Collision Warning (FCW).
- Intelligent Parking Assist (IPA).
- Lane Departure Warning (LDW).
- Night Vision System.
- Pedestrian Detection System (PDS).
- Road Sign Recognition (RSR).
- Tire Pressure Monitoring System (TPMS).
- Traffic Jam Assistant (TJA).
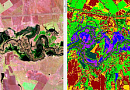
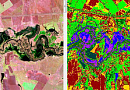
In global practice, the practical preparation of data for a comprehensive autonomous transport solution is based on using data from geospatial surveys conducted by UAVs and Earth observation satellites.
Countries at the forefront of the unmanned revolution - China, Germany, South Korea, and the USA - as of 2022, use level 4 autonomous vehicles that can operate in autonomous mode but allow human intervention to block control manually, at most and only within limited territories with strict restrictions in place. Therefore, it is worth questioning whether the implementation of level 5 autonomous driving systems will become a reality if infrastructure and legislation do not develop at a fast pace.
")
You can order from us






Goals and Objectivesfor High definition maps hd maps for autonomous vehicles:
Goal: To create a system for the support and facilitation of unmanned vehicle movement on the road network with a high level of safety.
Objectives: The preparatory geospatial work includes:
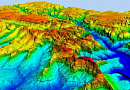
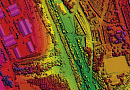
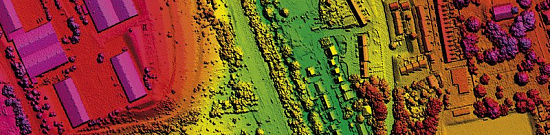
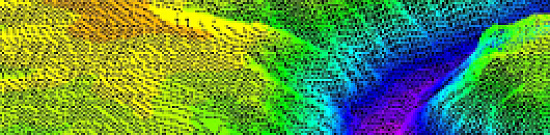
- 3D modeling of urban road conditions or complex surrounding environments, digital elevation models.
- Digitization of road traffic map objects in urban conditions:
- Digitization of lane map objects.
- Data digitization scale is 1:200.
- Digitization of roadway polygons.
- Boundaries of roadway polygons.
- Movements trajectories of unmanned vehicles.
- Centerlines of lanes should be separated into individual objects in the following cases:
- Change of lane markings on the right or left side of the lane.
- Merging with another lane.
- Lane division.
- Change in lane width.
- Change in vehicle speed on the lane.
- Entry to an intersection.
- Exit from an intersection.
- Entry to a pedestrian crossing.
- Exit from a pedestrian crossing.
- At a stop line.
- Transition from a straight road segment to a curved one.
- Entry to an artificial roughness.
- Exit from an artificial roughness.
- Change in stopping/parking possibilities in the lane.
- Outline of maneuvers at intersections.
Advantages of Using Earth Observation Data
The extensive coverage on highways, high detail in cities, and surrounding environment that hinders the building and control of autonomous driving, the transition from hidden structures (tunnels, mountains) to open terrain, poor weather conditions on the roads at a given moment - all these can be solved with field geodetic and textural work combined with Earth observation data carriers from satellites, aerial platforms (UAVs), to mobile Earth observation laboratories:
- High positional accuracy (sub-meter level accuracy) in time (synchronized for the entire system to milliseconds), ensured by recordings from various position and control sensors.
- UAVs are capable of creating complex digital road high definition maps (hd maps) and road conditions, including digital elevation models.
- Precise geospatial descriptions of movements serve as an indisputable legal basis for resolving legal disputes and identifying insurance cases.

Prices for services
| Consultation | Free |
|---|---|
| Selection of technical solution, preparation of technical task | Paid |
| Data ordering, providing shooting | Paid |
| Data processing | Paid |
| Cost of digitization for 1 km2 (including creation of 3D model) | From 500 USD |
The price starts from 40,000 rubles (1 square kilometer 3D model) and is calculated individually for each customer.
The cost of execution is calculated on an individual basis, taking into account a specific of task.
After receiving the task description, we calculate the cost and send you a commercial offer.
Period of execution
The completion period for the work is from 15 (fifteen) working days and is calculated individually for each customer.
The completion period depends on:
- The area of the area (urban streets) or the length of the route.
- The configuration of the autonomous vehicle.
- The time required for assembling technical equipment.
- The testing duration.
How to place an order:
Need for consultation?
Fill the form and we will contact you
Stages of service provision
The result of the provision of services
3D road models, digital map with road texture attributes, HD maps.high definition map (hd maps), high definition (hd) maps for autonomous vehicles
Requirements for Source Data
Selection of archived data from satellite (high-resolution) or UAV (drone) imagery for the territory or route of autopiloting.
If it is not possible to provide the specified information, please provide details about the intended use of the remote sensing materials. The specialists of GEO INNOTER will analyze the requirements and suggest an optimal solution to address the issue.
Related services










Customers




FAQ
- Traffic management.
- Bureaucracy.
- Infrastructure.
- Revenue.
- Liability insurance.
- Police and emergency response.
Licenses




Warranty
&Our partners












")





")



Sat-Sun: Non-working days